Cool Master
Last year I participated in the RedBull Creation Competition and had a great time building both the qualifier (Pourmaster Pro) and the main event which I describe here. So when I was told that they were doing it again, I was quick to jump at the chance to participate. This year they changed the rules a bit and had no limits on the number of people on the team, so I got a group together consisting of Chris Horne, Jeff Waegelin, Aren Hill, James Tonthat, Chuck Glick, Jay trzaskos, Art Dutra, Charles Wensel, Alex Zettler, and Myself. Keeping with how much we love beer, we figured it was only fitting to build something that highlights our devotion to the beverage. After much brainstorming the “Cool Master” was born. Below you will find some further information on how it was created and the details of the machine.
For the competition we had to make a video, here is our official entry.
Drive Base
The drive base on the Cool Master is made from a few different purchased items that were customized. The frame, motors, and speed controlers are all from VEX Pro Product Line. http://www.vexrobotics.com/products/vexpro/
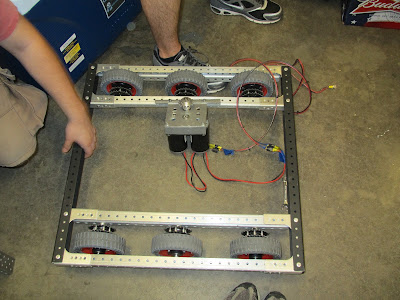
Frame – http://www.vexrobotics.com/products/vexpro/kitbot.html
Motors – http://www.vexrobotics.com/products/vexpro/217-2000.html
Free Speed: 5,310 rpm (+/- 10%)
Free Current: 2.7A
Maximum Power: 337 W (at 2,655 rpm, 172 oz-in, and 68A)
Stall Torque: 2.42 N-m (343.4 oz-in)
Stall Current: 133A
Mounting Holes: (4) #10-32 tapped holes on a 2″ bolt circle
We run these through spur gearboxes set at 10.7:1 ratio and then a chain reduction from the output to the wheel of 1.7:1 for an overall speed of ~6.29 ft/s
Wheels: Pneumatic tires from Mcmaster (PN 2717T51) with a custom machined hub.
Electronics

The electronics for the Cool Master are a combination between The Bullduino, Vex Robotics Cortex, and the Vex Pro Speed Controllers + Power distribution. Right now the Bulldunio is acting as a pass through controller feeding information from the internal mechanics to the vex controller, which directly drives the ESC to the motors and handles the wireless communications to the joysticks. For the next improvement we will also be making the unit control able from any mobile device and will use a wireless shield on the bullduino to remove the reliance on the vexnet controller. For simplicity and time constraints the Vexnet system is by far the easiest way to control a mobile robot.
Bullduino – Supplied by RedBull. Arduino Uno Clone with a few changes.
Vex Cortex – http://www.vexrobotics.com/products/accessories/logic/276-2194.html
VexNet Joystick – http://www.vexrobotics.com/276-2192.html
LEDs – Addressable LED strip from Shenzen electronics market.
ESC – 4 – Victor 884 motor controllers, 5- 29 Speed Controllers
Mechanism Motors – 5 Vex robotics 393 motors
Internal Mechanics